更新时间:2024-10-30 GMT+08:00
作业输入输出规范
用户完成自定义Rosbag转OpenData算子创建,运行作业容器时Octopus平台向其中注入以下环境变量:
- rosbag_path: 作为数据源的rosbag存放路径,例如/tmp/data/20220620.bag
- yaml_path: 启动数据收集任务的yaml文件路径,例如/tmp/Octopus_data_collections.yaml
- output_dir: rosbag数据包作业运行结果输出目录,例如/tmp/output
- tmp_dir: 供用户存储作业临时文件的目录,例如/tmp/workspace
用户的作业容器需要解析rosbag,并将转换结果输出到output目录,结果示例如下:

每个传感器提取的数据保存在单独的文件夹,其中camera和lidar传感器提取的样本文件必须以时间戳命名。任务结束标志文件,_SUCEESS或_FAILURE分别代表任务成功或失败。opendata_to_platform.yaml文件以yaml格式记录该OpenData数据包的元数据,格式如下:

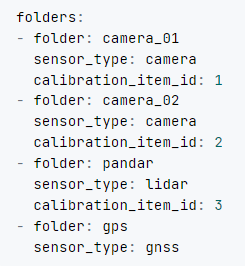
sensor_type字段标识传感器类型,可取以下值:camera、lidar、gnss、vehicle、ego_tf、object_array_vision、traffic_light_matched、tag_record、planning_trajectory、predicted_objects、control、routing_path、localization_visualization。具体定义参考数据包格式。
示例opendata_to_platform.yaml文件内容如下: