LLaVA-NeXT基于DevServer适配Pytorch NPU训练微调指导(6.3.910)
方案概览
本方案介绍了在ModelArts Lite DevServer上使用昇腾计算资源Ascend Snt9B开展LLaVA-NeXT模型的训练过程,包括pretrain_clip训练和Finetune_onevision训练。
约束限制
- 本方案目前仅适用于企业客户。
- 本文档适配昇腾云ModelArts 6.3.910版本,请参考获取配套版本的软件包和镜像,请严格遵照版本配套关系使用本文档。
- 确保容器可以访问公网。
资源规格要求
推荐使用“西南-贵阳一”Region上的DevServer资源和Ascend Snt9B。
获取软件和镜像
|
分类 |
名称 |
获取路径 |
|---|---|---|
|
插件代码包 |
AscendCloud-6.3.910软件包中的AscendCloud-AIGC-6.3.910-xxx.zip 文件名中的xxx表示具体的时间戳,以包名发布的实际时间为准。 |
获取路径:Support-E,在此路径中查找下载ModelArts 6.3.910 版本。
说明:
如果上述软件获取路径打开后未显示相应的软件信息,说明您没有下载权限,请联系您所在企业的华为方技术支持下载获取。 |
|
基础镜像包 |
swr.cn-southwest-2.myhuaweicloud.com/atelier/pytorch_2_1_ascend:pytorch_2.1.0-cann_8.0.rc3-py_3.9-hce_2.0.2409-aarch64-snt9b-20241112192643-c45ac6b |
SWR上拉取。 |
|
模型 |
版本 |
|---|---|
|
CANN |
cann_8.0.rc3 |
|
驱动 |
23.0.6 |
|
PyTorch |
2.1.0 |
步骤一 检查环境
- 请参考DevServer资源开通,购买DevServer资源,并确保机器已开通,密码已获取,能通过SSH登录,不同机器之间网络互通。

购买DevServer资源时如果无可选资源规格,需要联系华为云技术支持申请开通。
当容器需要提供服务给多个用户,或者多个用户共享使用该容器时,应限制容器访问Openstack的管理地址(169.254.169.254),以防止容器获取宿主机的元数据。具体操作请参见禁止容器获取宿主机元数据。
- SSH登录机器后,检查NPU卡状态。运行如下命令,返回NPU设备信息。
npu-smi info # 在每个实例节点上运行此命令可以看到NPU卡状态 npu-smi info -l | grep Total # 在每个实例节点上运行此命令可以看到总卡数
如出现错误,可能是机器上的NPU设备没有正常安装,或者NPU镜像被其他容器挂载。请先正常安装固件和驱动,或释放被挂载的NPU。
- 检查是否安装docker。
docker -v #检查docker是否安装
如尚未安装,运行以下命令安装docker。
yum install -y docker-engine.aarch64 docker-engine-selinux.noarch docker-runc.aarch64
- 配置IP转发,用于容器内的网络访问。执行以下命令查看net.ipv4.ip_forward配置项的值,如果为1,可跳过此步骤。
sysctl -p | grep net.ipv4.ip_forward
如果net.ipv4.ip_forward配置项的值不为1,执行以下命令配置IP转发。sed -i 's/net\.ipv4\.ip_forward=0/net\.ipv4\.ip_forward=1/g' /etc/sysctl.conf sysctl -p | grep net.ipv4.ip_forward
步骤二 获取基础镜像
建议使用官方提供的镜像部署推理服务。镜像地址{image_url}获取请参见表1 获取软件和镜像。
docker pull {image_url}
步骤三 启动容器镜像
启动容器镜像,启动前可以根据实际需要增加修改参数。
docker run -itd --net=host \
--device=/dev/davinci0 \
--device=/dev/davinci1 \
--device=/dev/davinci2 \
--device=/dev/davinci3 \
--device=/dev/davinci4 \
--device=/dev/davinci5 \
--device=/dev/davinci6 \
--device=/dev/davinci7 \
--device=/dev/davinci_manager \
--device=/dev/devmm_svm \
--device=/dev/hisi_hdc \
--shm-size=1024g \
-v /usr/local/dcmi:/usr/local/dcmi \
-v /usr/local/Ascend/driver:/usr/local/Ascend/driver \
-v /var/log/npu/:/usr/slog \
-v /usr/local/sbin/npu-smi:/usr/local/sbin/npu-smi \
-v ${work_dir}:${container_work_dir} \
--name ${container_name} \
${image_id} \
/bin/bash
- --device=/dev/davinciX 挂载NPU设备,示例中挂载了8张卡
- work_dir:工作目录,目录下存放着训练所需代码、数据等文件
- container_work_dir: 容器工作目录,一般同work_dir
- container_name:自定义容器名
- image_id:镜像ID,通过docker images来查看拉取的镜像ID。
步骤四 进入容器
通过容器名称进入容器中。默认使用ma-user用户执行后续命令。
docker exec -it ${container_name} bash
修改权限。
sudo chown -R ma-user:ma-group ${container_work_dir}
此步骤可能需要密码或root权限。
步骤五 下载代码安装环境
下载华为侧插件代码包AscendCloud-AIGC-6.3.910-xxx.zip文件,获取路径参见表1 获取软件和镜像。
mv AscendCloud-AIGC-6.3.910-xxx.zip ${container_work_dir}
cd ${container_work_dir}
unzip AscendCloud-AIGC-6.3.910-*.zip
cd multimodal_algorithm/LLAVA-NEXT/train/c7cc95c0ed68ee553cf0870b6684695df609bb38
bash llava_next_install.sh
cp pretrain_clip_ascend.sh finetune_onevision_ascend.sh ./LLaVA-NeXT/scripts/train
步骤六 增加适配代码
# 安装优化加速包
cd ${container_work_dir}/multimodal_algorithm/ascendcloud_multimodal_plugin
pip install -e .
# 使能优化加速包step1(此步默认在环境安装阶段已完成)
cd ${container_work_dir}/multimodal_algorithm/LLAVA-NEXT/train/c7cc95c0ed68ee553cf0870b6684695df609bb38/LLaVA-NeXT/
在./llava/train/train_mem.py 引入优化代码包 from ascendcloud_multimodal.train.models.llava_next.ascend_modeling_llava_next import *
# 使能优化加速包step2
cp -rf ${container_work_dir}/multimodal_algorithm/ascendcloud_multimodal_plugin/ascendcloud_multimodal/train/models/llava_next/siglip_encoder.py ${container_work_dir}/multimodal_algorithm/LLAVA-NEXT/train/c7cc95c0ed68ee553cf0870b6684695df609bb38/LLaVA-NeXT/llava/model/multimodal_encoder/
步骤七 下载数据集
数据集需从huggingface下载LLaVA-Pretrain,VideoGPT-plus_Training_Dataset(其中的vcg-plus_112K.json和activitynet_videos.tgz)。
方式1:手动下载以上所列数据集,并将其放置在${container_work_dir}/data路径下, data目录需手动创建。
方式2:利用git下载,须确保git lfs已成功安装:
mkdir -p ${container_work_dir}/data && cd ${container_work_dir}/data
# 下载pretrain_clip场景的数据集
git clone https://huggingface.co/datasets/liuhaotian/LLaVA-Pretrain
cd LLaVA-Pretrain
git lfs pull
# 待下载成功后,解压文件
unzip images.zip
# 下载fintune_onevision场景的数据集
cd ${container_work_dir}/data
git clone https://huggingface.co/datasets/MBZUAI/VideoGPT-plus_Training_Dataset
cd VideoGPT-plus_Training_Dataset
git lfs pull --include="annotations/vcg-plus_112K.json"
git lfs pull --include="instruction_tuning/activitynet_videos.tgz"
# 待下载成功后,解压文件
cd ${container_work_dir}/data/VideoGPT-plus_Training_Dataset/instruction_tuning
tar -xzvf activitynet_videos.tgz
步骤八 下载模型权重
模型权重需从huggingface准备Qwen2-7B-Instruct,clip-vit-large-patch14-336,siglip-so400m-patch14-384。
方式1:手动下载以上所列权重,并将其放置在${container_work_dir}/pretrained路径下, pretrained目录需手动创建。
方式2:利用git下载,须确保git lfs已成功安装:
mkdir -p ${container_work_dir}/pretrained
# 下载 Qwen2-7B-Instruct
cd ${container_work_dir}/pretrained
git clone https://huggingface.co/Qwen/Qwen2-7B-Instruct
cd Qwen2-7B-Instruct
git lfs pull
# 下载 clip-vit-large-patch14-336(pretrain_clip场景)
cd ${container_work_dir}/pretrained
git clone https://huggingface.co/openai/clip-vit-large-patch14-336
cd clip-vit-large-patch14-336
git lfs pull
# 下载 siglip-so400m-patch14-384(finetune_onevision场景)
cd ${container_work_dir}/pretrained
git clone https://huggingface.co/google/siglip-so400m-patch14-384
cd siglip-so400m-patch14-384
git lfs pull
步骤九 开始训练
单机训练
cd ${container_work_dir}/multimodal_algorithm/LLAVA-NEXT/train/c7cc95c0ed68ee553cf0870b6684695df609bb38/LLaVA-NeXT
# pretrain_clip场景
NUM_GPUS=8 NNODES=1 RANK=0 ADDR=localhost PORT=23245 bash scripts/train/pretrain_clip_ascend.sh # 需修改pretrain_clip_ascend.sh中的数据集和模型路径为步骤七和步骤八的下载完成后的路径
# finetune_onevision场景
NUM_GPUS=8 NNODES=1 RANK=0 ADDR=localhost PORT=23245 bash scripts/train/finetune_onevision_ascend.sh # 需修改finetune_onevision_ascend.sh中的数据集和模型路径为步骤七和步骤八的下载完成后的路径
多机训练
cd ${container_work_dir}/multimodal_algorithm/LLAVA-NEXT/train/c7cc95c0ed68ee553cf0870b6684695df609bb38/LLaVA-NeXT
# pretrain_clip场景
NUM_GPUS=8 NNODES=${NODE_NUM} RANK=${NODE_RANK} ADDR=${MASTER_NODE_IP} PORT=23245 bash scripts/train/pretrain_clip_ascend.sh # 需修改pretrain_clip_ascend.sh中的数据集和模型路径为步骤七和步骤八的下载完成后的路径
# finetune_onevision场景
NUM_GPUS=8 NNODES=${NODE_NUM} RANK=${NODE_RANK} ADDR=${MASTER_NODE_IP} PORT=23245 bash scripts/train/finetune_onevision_ascend.sh # 需修改finetune_onevision_ascend.sh中的数据集和模型路径为步骤七和步骤八的下载完成后的路径
路径修改说明:
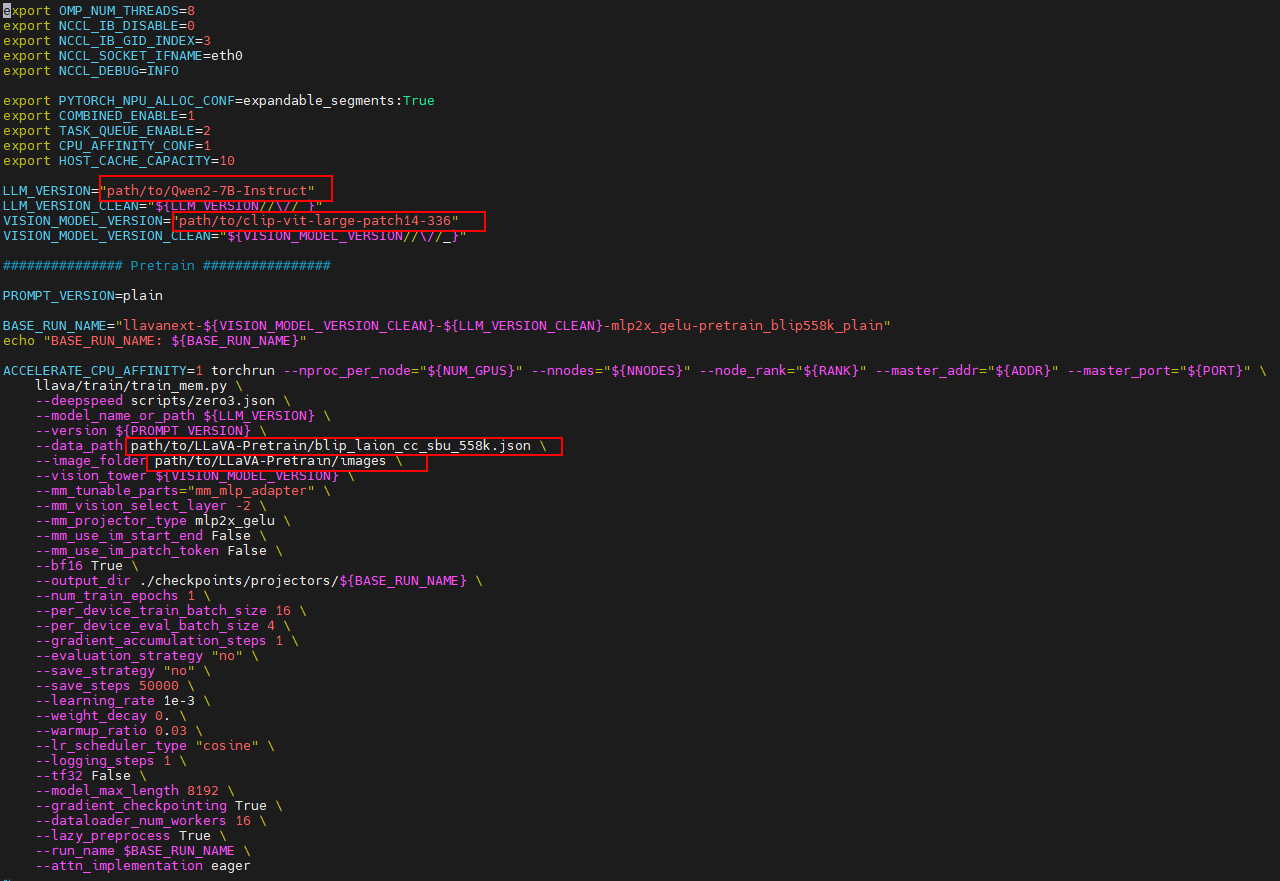
- 执行训练脚本前,需修改pretrain_clip_ascend.sh中的数据集和模型路径为步骤七和步骤八的下载完成后的路径,如图1所示;
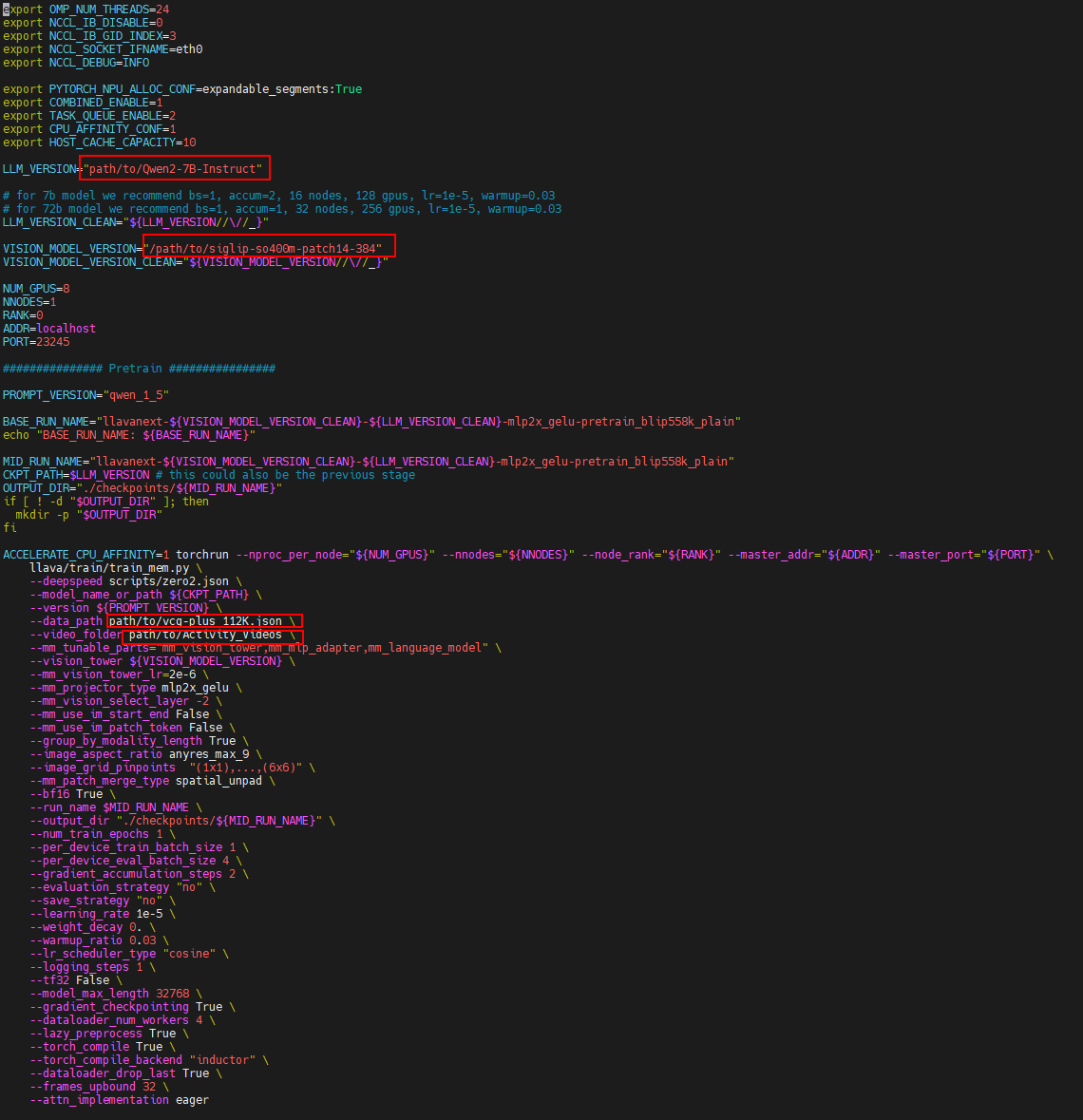
- 执行训练脚本前,修改finetune_onevision_ascend.sh中的数据集和模型路径为步骤七和步骤八的下载完成后的路径,如图2所示。
参数说明:
- NODE_NUM:机器数量。
- NODE_RANK:机器rank num,主机为0,其余递增。
- MASTER_ADDR:主机IP地址。
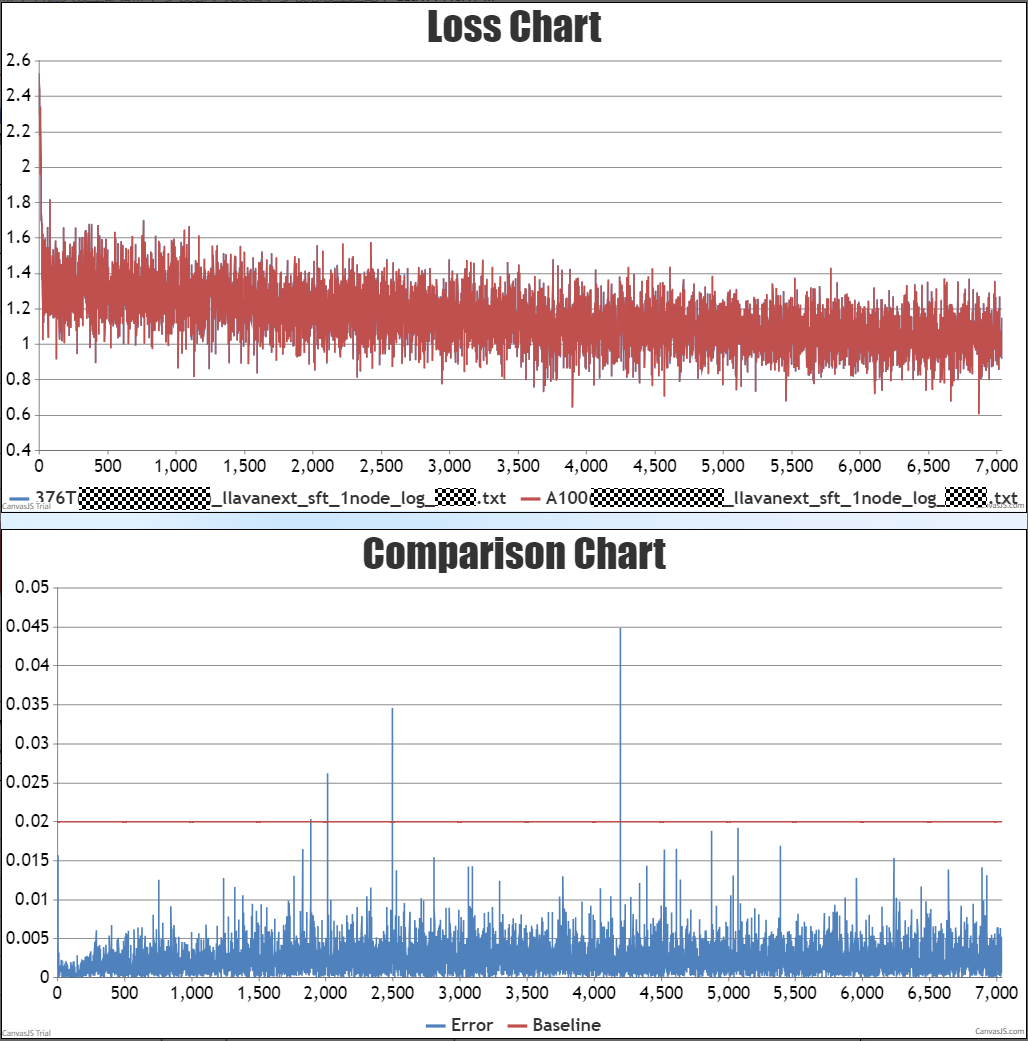
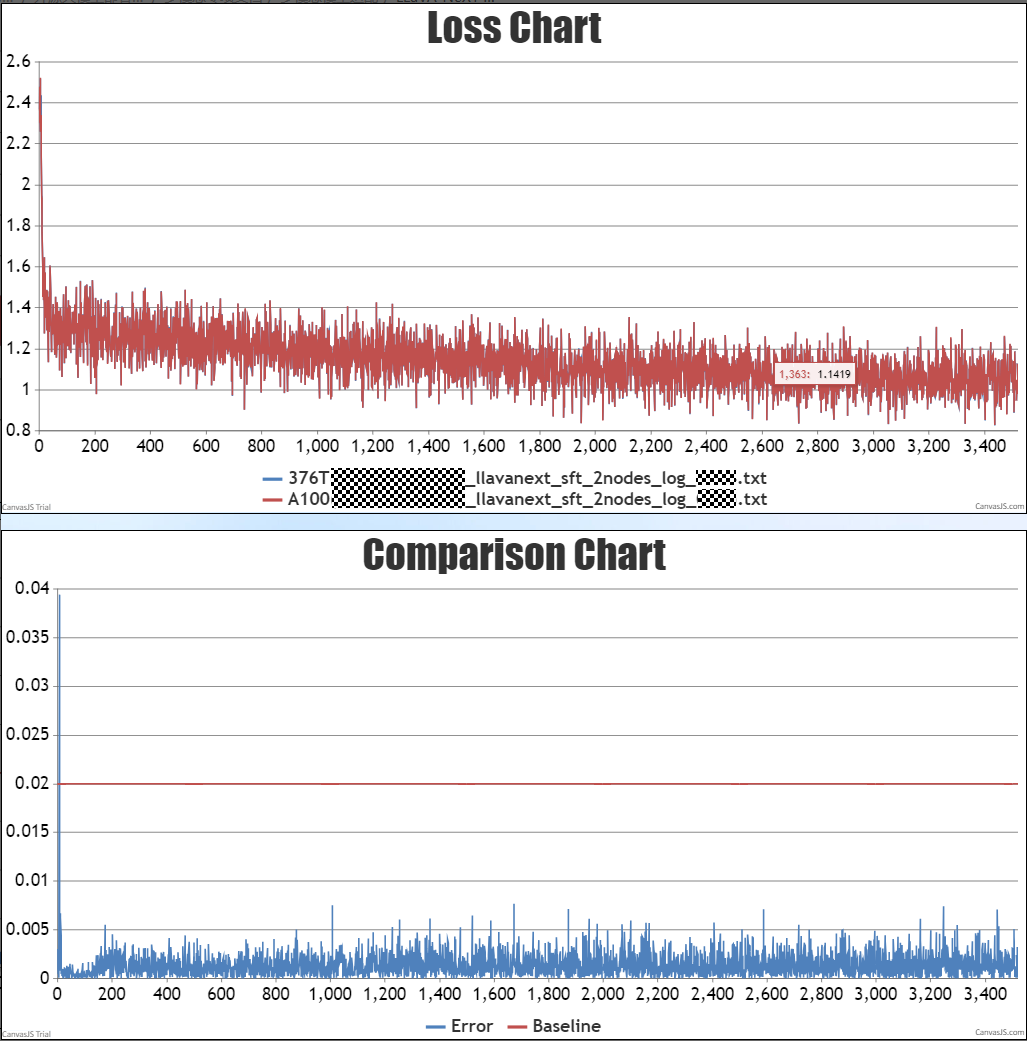
训练成功如下图所示。


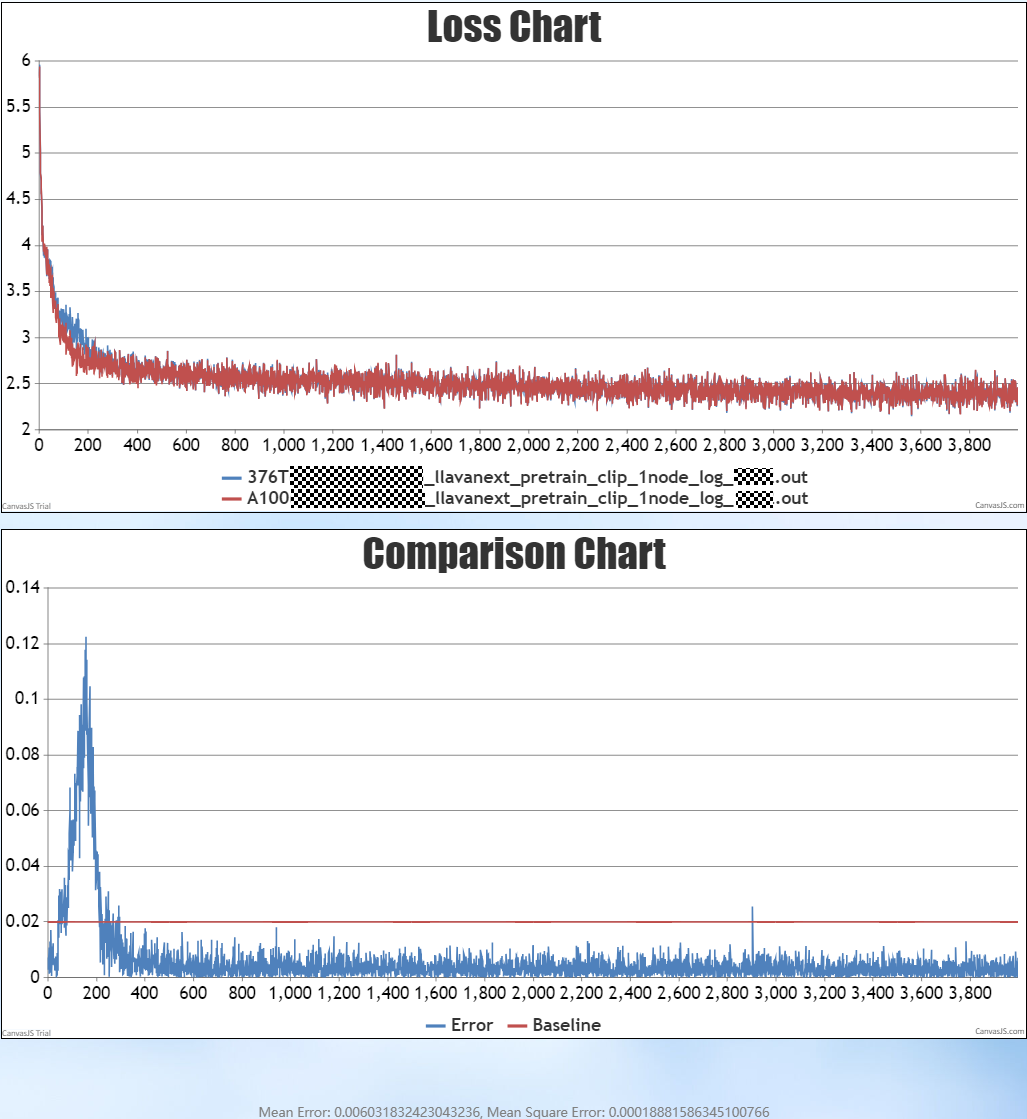
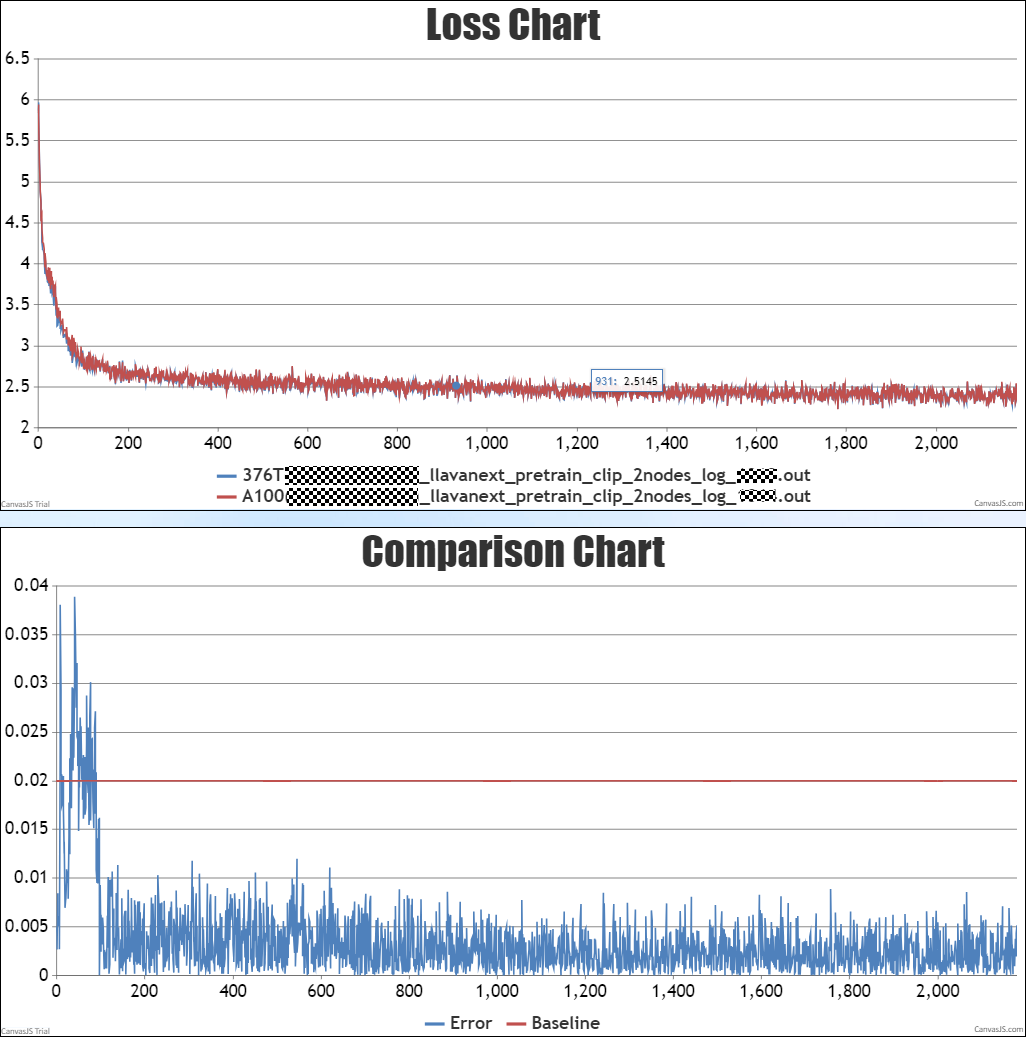
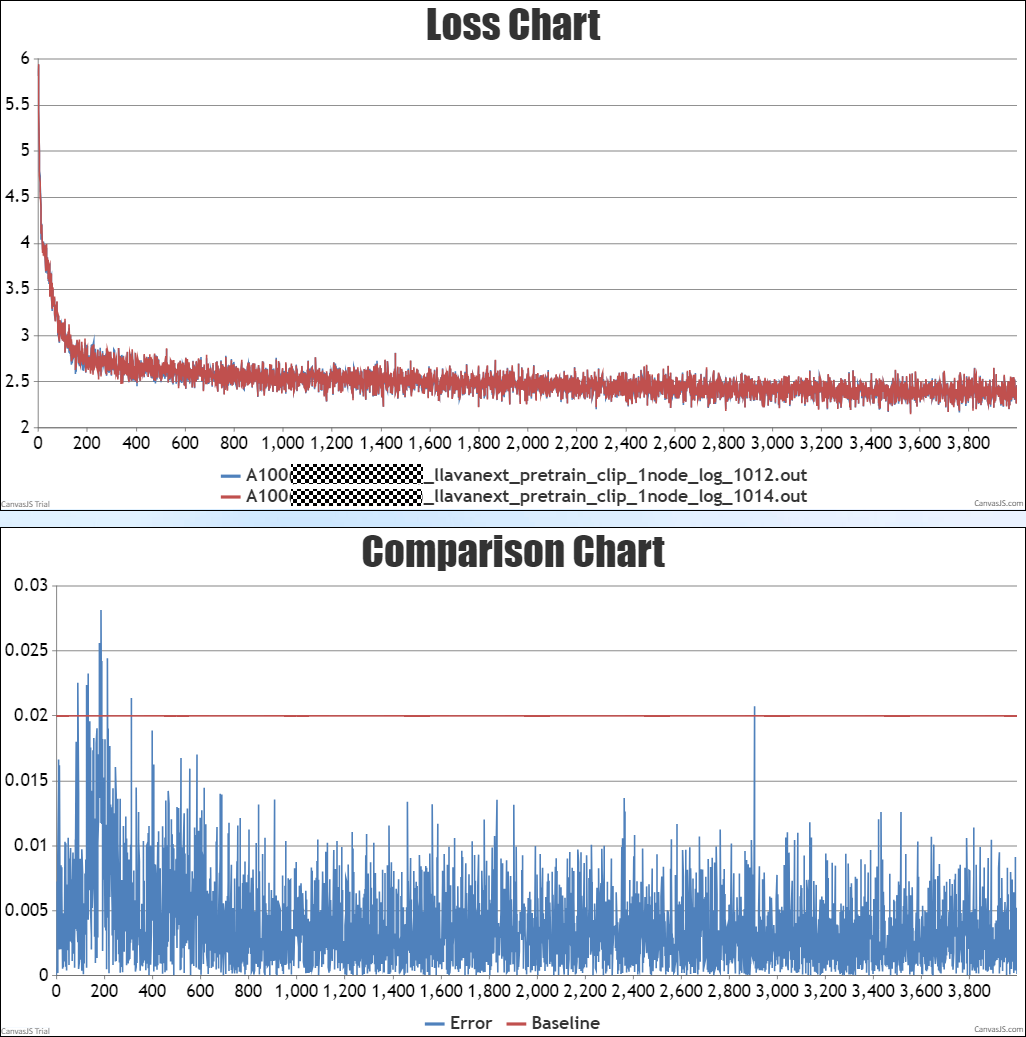
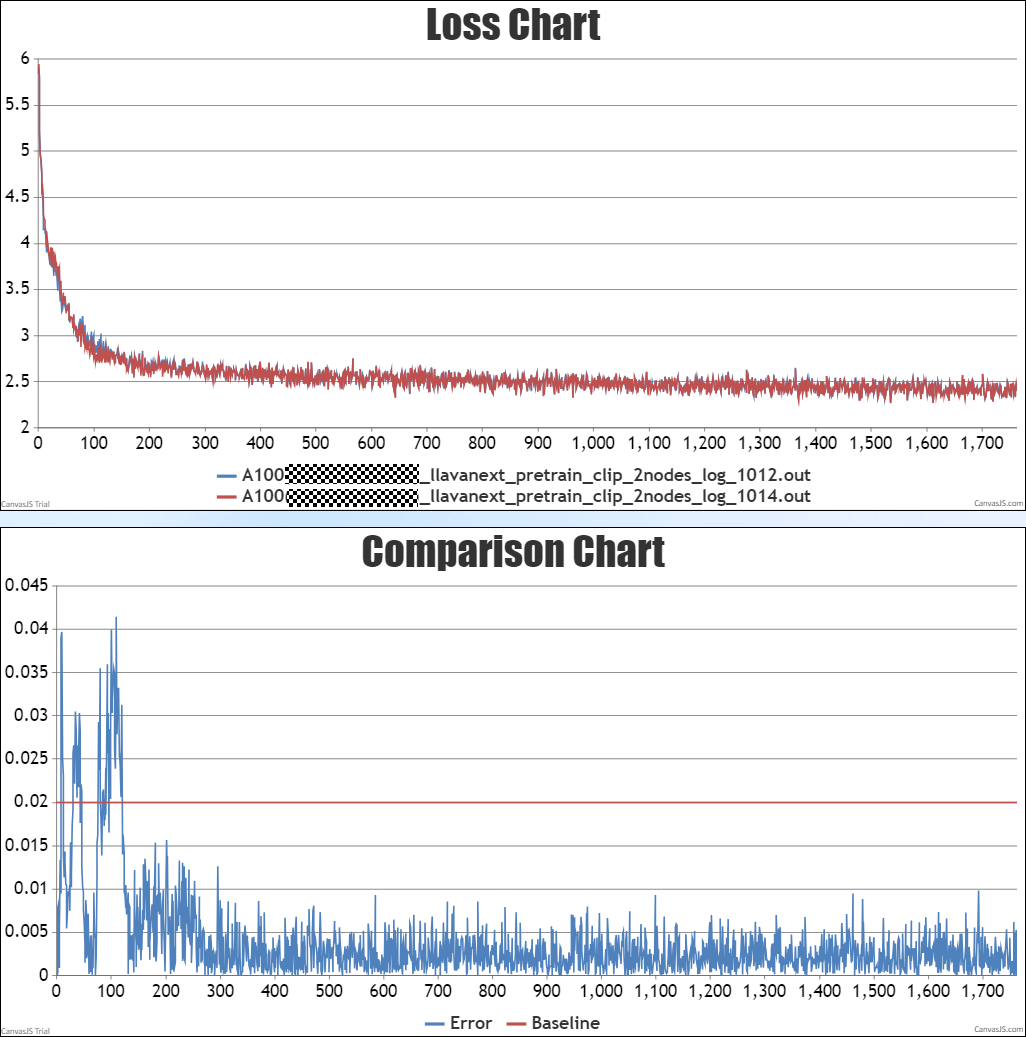
由图5到图8可知pretrain_clip训练100步附近的波动正常。