

更新时间:2025-07-14 GMT+08:00
使用时序路径功能分析图
从一个点出发搜索到目标节点的时序路径(时序路径满足动态图上信息传播的有序性,路径上后一条边的经过时间要晚于或等于前一条边的经过时间),在画布上呈现点、边随时间递增(或非减)的变化趋势。
该功能可以通过strategy参数调整,搜索的是距离最短的时序路径,还是尽早到达目标节点的时序路径。
具体操作步骤如下:
- 在左侧“动态图”操作区的“时序路径”模块内填写参数:
- 开始和结束的时间以及属性值:在上述章节动态图时间轴设置中已经设置完成,如果要修改参数,单击当前输入框或左下方
 按钮,在弹出的“时间轴设置”框内填写,此处不可填写。
按钮,在弹出的“时间轴设置”框内填写,此处不可填写。 - source:指定单个节点作为起始节点ID。
- targets:终点节点ID集合(可设置多个终点节点ID)。
- k:拓展深度,表示要拓展的最大级数,取值范围为1-100,默认值为3。
- strategy:运行的算法策略,取值为shortest或foremost。
- shortest:返回距离最短的时序路径。
- foremost:返回尽可能早的到达目标节点的时序路径。
- directed:拓展方向(是否考虑边的方向)取值为true或false,默认true。
- true:考虑边的方向。
- false:不考虑边的方向。
图1 时序路径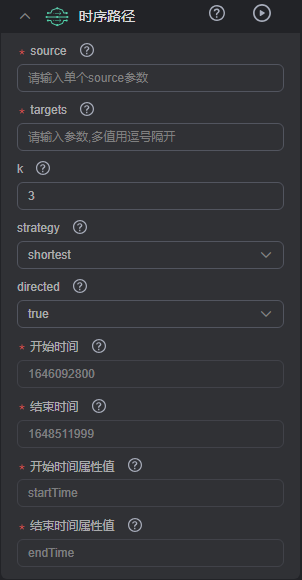
- 开始和结束的时间以及属性值:在上述章节动态图时间轴设置中已经设置完成,如果要修改参数,单击当前输入框或左下方
- 输入完成后,单击“时序路径”模块右侧的
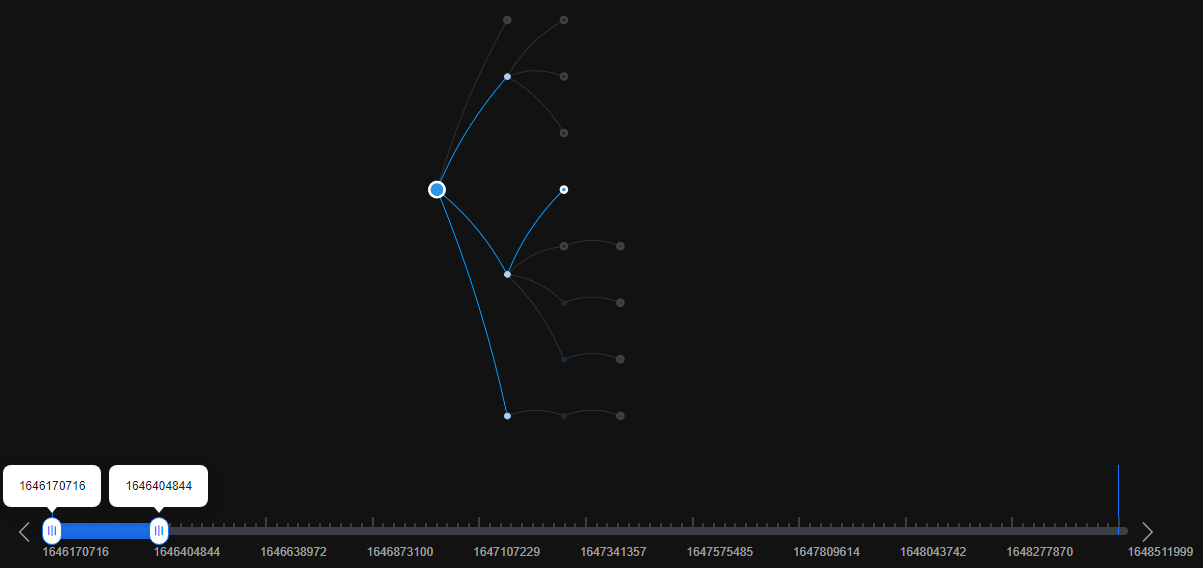
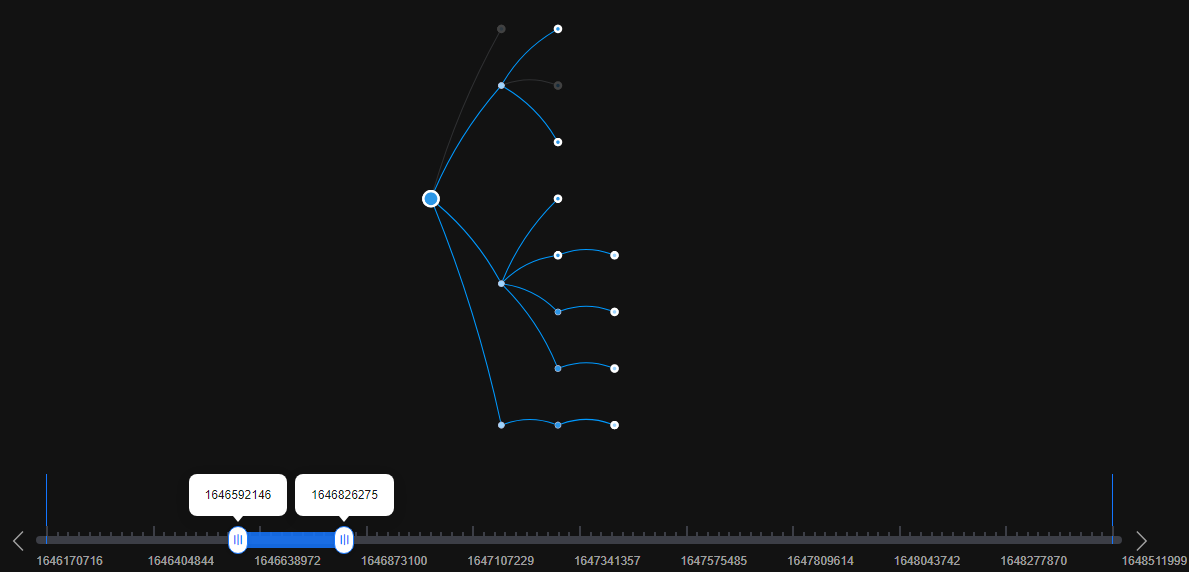
 按钮,运行结果将在画布上展示。例如图2和图3所示,动态图数据会随着时间呈现变化趋势。
按钮,运行结果将在画布上展示。例如图2和图3所示,动态图数据会随着时间呈现变化趋势。
父主题: 动态图分析




