
Usage Suggestions and Performance Optimization for DWS 3.0 Storage-Compute Decoupled Clusters
Scenarios
The newly released DWS 3.0 version provides resource pooling, massive storage, and the MPP architecture with decoupled compute and storage. This enables high elasticity, real-time data import and sharing, and lake warehouse integration.
For more information about decoupled compute and storage, see What Is DWS?.
This document describes the performance optimization and precautions of the decoupled storage-compute version.
Purchasing a Cluster
- EVS disk space
In version 9.1.0.x, only column-store user data is stored on OBS, while other data remains on local disks. Consequently, even in a storage-compute decoupled architecture, additional EVS disks still need to be configured, and not just minimally sized disks. The storage-compute decoupling capability will continue to evolve in future versions.
Table 1 Storage of different table types Table Type
Storage Location
Scenario
Row-store table, temporary table, and column-store index
Local, no compression
Point query, real-time small-batch import, and frequent update.
Column-store table 2.0
Local, compressed
Batch import, query, real-time small-batch import, point query, and update.
Column-store table 3.0
OBS, compressed
Batch import, query, and low-frequency batch update.
EVS storage: row-store and column-store metadata (min/max), indexes, Delta, WAL, OBS data cache, and temporary files (sort/hash) in computing. The size can be specified when you purchase a DWS cluster.
Formula for calculating the required total EVS storage size:
(2 copies x (Row-store table size + Index size + Delta table size) + OBS hot data cache size)/0.8 (reserved)
When the total EVS storage size surpasses 90%, the cluster transitions to read-only mode. The reserved 10% space is allocated for storing WALs and temporary files.
- OBS hot data: If you specify the hot data size, use that value. Otherwise, set it to 30% of the total OBS data volume.
- Size of a column-store index = Size of original uncompressed data x Index column width x 3 (Bloat rate) /Total column width
- Column-store data is evaluated based on the compression ratio of 3:1. Assume that a table contains 20 columns, two of which are primary keys. The index size is about 30% of the data size before compression and matches the data size after compression.
- Delta size: Max (10 GB, size of the compressed table/10) of a table (or partition)
- The size of a row-store index is calculated based on 30% of the size of the compressed table.
Recommended EVS disk space: Utilizing the aforementioned algorithm can be complex. It is advisable to configure the total EVS disk space to match the total data volume after compression, assuming a compression ratio of 5x. If the table lacks an index (with EVS primarily serving as cache), set the total EVS disk space to 50% or 30% of the total data volume (excluding archived data) and subsequently increase the disk cache size (refer to the following section for details).
Minimum capacity
- Performance-sensitive customers: Ensure that each primary/standby DN has a minimum disk capacity of 500 GB to achieve a throughput of 350 MB/s per disk. For instance, if two primary and two standby DNs are deployed on an ECS, at least four 500 GB disks must be mounted to the ECS.
- Cost-sensitive customers: At least 200 GB (160 MB/s per disk) is mounted to each primary/standby DN.
- OBS configuration
OBS must be deployed in three AZs and support parallel file systems.
OBS performance
If you need to adjust the OBS performance specifications, contact technical support. In public cloud scenarios, OBS metrics do not need to be adjusted for a cluster with six or fewer DNs.
- CPU configuration
In a production environment, it is advised that each node has a minimum of 16 vCPUs. Configurations of 4 vCPUs or 8 vCPUs are typically used only for experimental or testing purposes.
- Migration scenario: Ensure that the CPU cores match the migration objects.
- New deployment scenario: Calculate the number of required CPU cores by dividing the total data volume by 100 GB. Note that the number of CPU cores required can vary based on the specific use case. If the computational load is high, it is recommended to increase the number of CPU cores accordingly.
Table Design Optimization
Table creation statements
By default, DWS creates row-store tables. In OLAP analysis scenarios, you need to explicitly set ORIENTATION to column-store when creating tables.
For details, see CREATE TABLE in SQL Syntax Reference.
1 | CREATE TABLE public.t1(id integer) WITH (ORIENTATION =COLUMN); |
Table design optimization
In a storage-compute decoupling architecture, data is stored in the Object Storage Service (OBS). To optimize performance, it's crucial to use filtering methods to avoid unnecessary remote Compute Unit (CU) data read overhead. This approach significantly enhances performance.
Filtering methods
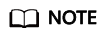
DWS is compatible with the PostgreSQL ecosystem. Row storage and its B-tree index are similar to those of PostgreSQL. Column storage and its index are self-developed. When creating a table, it's important to select an appropriate storage mode, distribution column, partition key, and index to ensure that data can be quickly accessed during SQL execution, thereby reducing I/O consumption. The following figure shows the process from initiating an SQL statement to obtaining data. You can understand the function of each technical approach for better performance optimization.
- When the SQL statement is executed, the partitioned table is optimized using the Partition Column to pinpoint the specific partition.
- The Distribute Column is used in a distributed hash table to quickly identify the data shard where the data resides. In a storage-compute coupled architecture, the data shard is located on a DN, while in a storage-compute decoupled architecture, it's located on a bucket.
- In row-store mode, the B-tree index is used to quickly locate the data page. In column-store mode, the min-max index is used to quickly locate the CU data block that may contain relevant data. This index is particularly effective when filtering on the PCK column.
- The system automatically maintains the min-max index for all columns in the column-store mode. There's no need for manual index definition. The min-max index serves as a coarse filter. However, CU data blocks that meet the min-max condition may not necessarily contain data rows that meet the filter condition. If a bitmap column is defined, the bitmap index can be used to quickly locate the row number of the data that meets the filter condition within the CU. For ordered CUs, binary search can also be employed to quickly find the row number.
- Column storage supports B-tree and GIN indexes, which can quickly locate the CU and row number of data that meets the conditions. However, due to high index maintenance costs, you are advised to use bitmap indexes instead, unless there are high performance requirements for point queries.
Optimization methods
The following uses a table creation statement to describe the existing optimization methods of DWS. For details, see CREATE TABLE in SQL Syntax Reference.

| No. | Optimization Item | Suggestion | Example SQL | Modifiable After Creation | ||
|---|---|---|---|---|---|---|
| 1 | String type |
| - | Yes. Modification rewrites existing data. | ||
| 2 | Numeric type | Specify precision for the numeric type, which doubles the performance. Do not use numeric types without precision. | -- | Yes. Modification rewrites existing data. | ||
| 3 | Partition by Column |
|
| No. If modification is needed, create a table again. | ||
| 4 | secondary_part_column |
|
| No. If modification is needed, create a table again. | ||
| 5 | Distribute by Column | Define this field. It is applicable to the join field frequently used for GROUP BY or multi-table join operations. Local joins reduce data shuffling and are suitable for equivalent queries. |
| No. If modification is needed, create a table again. | ||
| 6 | Bitmap_columns | Create an adaptive bitmap index (for cardinality ≤ 32) or bloom filter (for cardinality > 32) based on repeated values in the CU. This is applicable to equivalent query scenarios for VARCHAR or TEXT columns. It is recommended to define the columns involved in the WHERE condition. |
| Yes. Modification does not rewrite existing data. Only the new data is affected. | ||
| 7 | Min-max index |
|
| The PCK can be modified. Modification does not rewrite existing data. Only the new data is affected. | ||
| 8 | Primary key (B-tree index) |
|
| Yes. After modification, the index will be recreated. | ||
| GIN index |
|
| Yes. After modification, the index will be recreated. | |||
| 9 | Orientation=column/row | Specify whether a table is stored in row or column mode. Row-store tables are uncompressed, ideal for point queries and frequent updates. Column-store tables are compressed and are best suited for analysis scenarios. | - | No. If modification is needed, create a table again. |
Disk Cache
DWS caches frequently accessed data on local EVS disks to minimize direct reads from OBS and enhance data query performance. The disk cache is exclusive to the DN compute nodes and is not present on the CNs.
Cache size
The default value of disk_cache_max_size is half of the EVS capacity. To change its value, contact technical support.
The EVS capacity is split into two sections: half of it is allocated for storing local persistent data, such as column-store indexes, row-store tables, and local column-store tables, while the other half is set aside for cache purposes. DWS indexes store index data. If no index is created for a column-store table, you can increase the value of disk_cache_max_size.
Cache status
When a user queries data, the system first checks if the data exists in the local disk cache. If the data is not present, the system reads it from OBS and caches it to the local disk for future access. This caching mechanism can significantly enhance the speed of OBS data queries.
By default, the disk cache uses two disks in active/standby mode as the cache media. You can query the following parameters to view related information:
- query the disk_cache_base_paths: You can use it to view, add or delete cache disk paths. To set this parameter, contact technical support.
- disk_cache_max_size: You can use it to view and adjust the disk cache size.
Use the pgxc_disk_cache_all_stats view to view the current cache hit ratio and the disk usage of each DN.

Cache dual-write
Enabling Cache Dual-Write can enhance the performance of the first data query. Specifically, when data is written to the remote OBS, it is also written to the local disk cache. This improves read efficiency significantly during the initial data access. You can use the disk_cache_dual_write_option to configure whether to enable cache dual-write. The options are as follows:
- none: Disable cache dual-write.
- hstore_only (default value): Enable cache dual-write only for the HStore table during delta merge.
- all: Enable cache dual-write for both common v3 tables and HStore tables.
Clearing the Cache
Use the pgxc_clear_disk_cache() function to clear all disk caches.
Insufficient cluster space and disk cache space adjustment
To address resource shortages in a cluster, consider reducing the disk cache space. This can help free up disk space and alleviate the issue, especially for clusters that have already used a significant amount of disk cache space.
Adjust the disk_cache_max_size parameter to reduce the actual disk cache space and alleviate cluster space insufficiency.
For example, the total disk capacity is 1,000 GB and the value of disk_cache_max_size is 500 GB, and the actual disk usage queried in the pgxc_disk_cache_all_stats view is 450 GB. When the total disk usage reaches 900 GB, the ThresholdReadRisk issue will be triggered, indicating that there are insufficient remaining resources. If there are no column-store tables of version 2.0 or index resources that can be cleared, you can change the value of disk_cache_max_size to 300 GB or a smaller value. Reducing the available disk cache may deteriorate query performance.
Disk usage alarms are determined as follows:
- Capacity warning: Disk space usage or file descriptor usage exceeds the ThresholdReadOnly value (80% by default). The log will contain "Disk usage on the node %u has reached the risky threshold 80%."
- Insufficient capacity: Disk space usage or file descriptor usage exceeds the ThresholdReadRisk value (90% by default), making the cluster read-only. The log will display "Disk usage on the node %u has reached the read-only threshold 90%."
- Severely insufficient capacity: Disk space usage or file descriptor usage exceeds the ThresholdReadDanger value (95% by default), causing the standby and secondary DNs to terminate and the primary DN to restart. The log will display "Disk usage on the node %u has reached the dangerous threshold 95%."
Insertion Performance
Bucket storage
Bucket storage is a method of data sharding that, similar to partitioning technology, groups data with the same attribute values together. This approach facilitates the adjustment of the mapping between storage and computing, enabling a separation of storage and computing resources, and allowing for elastic scaling and on-demand allocation of computing resources.
For instance, if there are eight buckets and two DNs, each DN would be responsible for four buckets. Conversely, if there are four DNs, each DN would be responsible for two buckets.

Import optimization
Data needs to be saved to the database in batches, with asynchronous I/O.
Batching: This technique is employed to avoid small Compute Units (CUs) and enhance subsequent query performance.
Asynchronous I/O: Following the decoupling of storage and compute, the latency for writing data to OBS is approximately ten times higher than writing data to EVS. Asynchronous I/O optimizes read and write performance.
- For partitioned tables, 2.0 tables require only partition batching. 3.0 tables, in comparison, require bucket batching (equivalent to level-2 partitions), which may consume more memory and disk space.
- Only hash-distributed tables necessitate bucket batching.
Batching overhead and suggestions
Overhead
Number of partitions: #Np Number of buckets on each node: #Nb RowGroup size before compression: #Nr Maximum size of a single bucket: #Mb = max (partition_max_cache_size/partition_men_batch, 16M) = 16M (default configuration) Single-concurrency batching consumption: #Np * #Nb * #Nr Single-concurrency batching memory consumption: partition_max_cache_size. The default value is 2 GB. Single-concurrency batching disk consumption: #Np * #Nb * #Nr * 1.2 (bloat rate) - Memory consumption Assume that data is copied at a time, 1000 partitions are involved, #Nb ≈ 10, the size of a single record is 1 KB, and the total batching size is 10,000 rows. Single-concurrency batching consumption: 1000 * 10 * 1K * 10000 * 1.2 = 120 GB
Suggestions
- Application layer optimization: The key factor is the number of partitions. It is recommended to use a single partition for importing data into the database. If the consumed space of a single concurrent batching operation is reduced from 120 GB to 120 MB, the memory can be directly utilized for batching.
- Database Kernel Optimization: Modify the min_batch_rows parameter to adjust the batch size. You can execute the SET statement to apply the changes for the current session or modify the configuration file to make the changes effective immediately.
Feedback
Was this page helpful?
Provide feedbackThank you very much for your feedback. We will continue working to improve the documentation.See the reply and handling status in My Cloud VOC.
For any further questions, feel free to contact us through the chatbot.
Chatbot



